



Dreiachsiger horizontaler Drehpositionierer / Schweißroboterpositionierer
Technische Parameter
| Vertikaler Dreh-Triaxial-Servopositionierer | Horizontaler Dreh-Triaxial-Servopositionierer | ||||||
| Seriennummer | PROJEKTE | Parameter | Parameter | ANMERKUNGEN | Parameter | Parameter | ANMERKUNGEN |
| 1 | Nennlast | 500 kg | 1000 kg | Innerhalb eines Radius von R400 mm um die zweite Achse | 500 kg | 1000 kg | Innerhalb eines Radius von R400 mm/R500 mm um die zweite Achse |
| 2 | Standard-Trägheitsradius der Spindel | R1200mm | R1500mm | R1200mm | R1800mm | ||
| 3 | Standard-Trägheitsradius der Zwischenwelle | R400mm | R500mm | R400mm | R500mm | ||
| 4 | erster Achsen-Flipwinkel | ±180° | ±180° | ±180° | ±180° | ||
| 5 | Drehwinkel der zweiten Achse | ±360° | ±360° | ±360° | ±360° | ||
| 6 | Bemessungs-Aufwärtsdrehgeschwindigkeit der ersten Achse | 50°/S | 24°/S | 50°/S | 24°/S | ||
| 7 | Nenndrehzahl der zweiten Achse | 70°/S | 70°/S | 70°/S | 70°/S | ||
| 8 | Wiederholgenauigkeit der Positionierung | ±0,10 mm | ±0,20 mm | ±0,10 mm | ±0,20 mm | ||
| 9 | Randabmessungen des Verschiebungsrahmens (Länge×Breite×Höhe) | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | ||
| 10 | Gesamtabmessungen des Positionsschalters (Länge × Breite × Höhe) | 4000 mm × 700 mm × 1650 mm | 5200 mm × 1000 mm × 1850 mm | 4000 mm × 700 mm × 1650 mm | 4500 mm × 3600 mm × 1750 mm | ||
| 11 | Mittelpunktshöhe der ersten Achsenrotation | 1350 mm | 1500 mm | 800 mm | 1000 mm | ||
| 12 | Stromversorgungsbedingungen | Dreiphasig 200 V ± 10 % 50 Hz | Dreiphasig 200 V ± 10 % 50 Hz | Dreiphasig 200 V ± 10 % 50 Hz | Dreiphasig 200 V ± 10 % 50 Hz | Mit Trenntransformator | |
| 13 | Isolationsklasse | H | H | H | H | ||
| 14 | Nettogewicht der Ausrüstung | etwa 1800 kg | etwa 3000 kg | etwa 2000 kg | etwa 2000 kg | ||
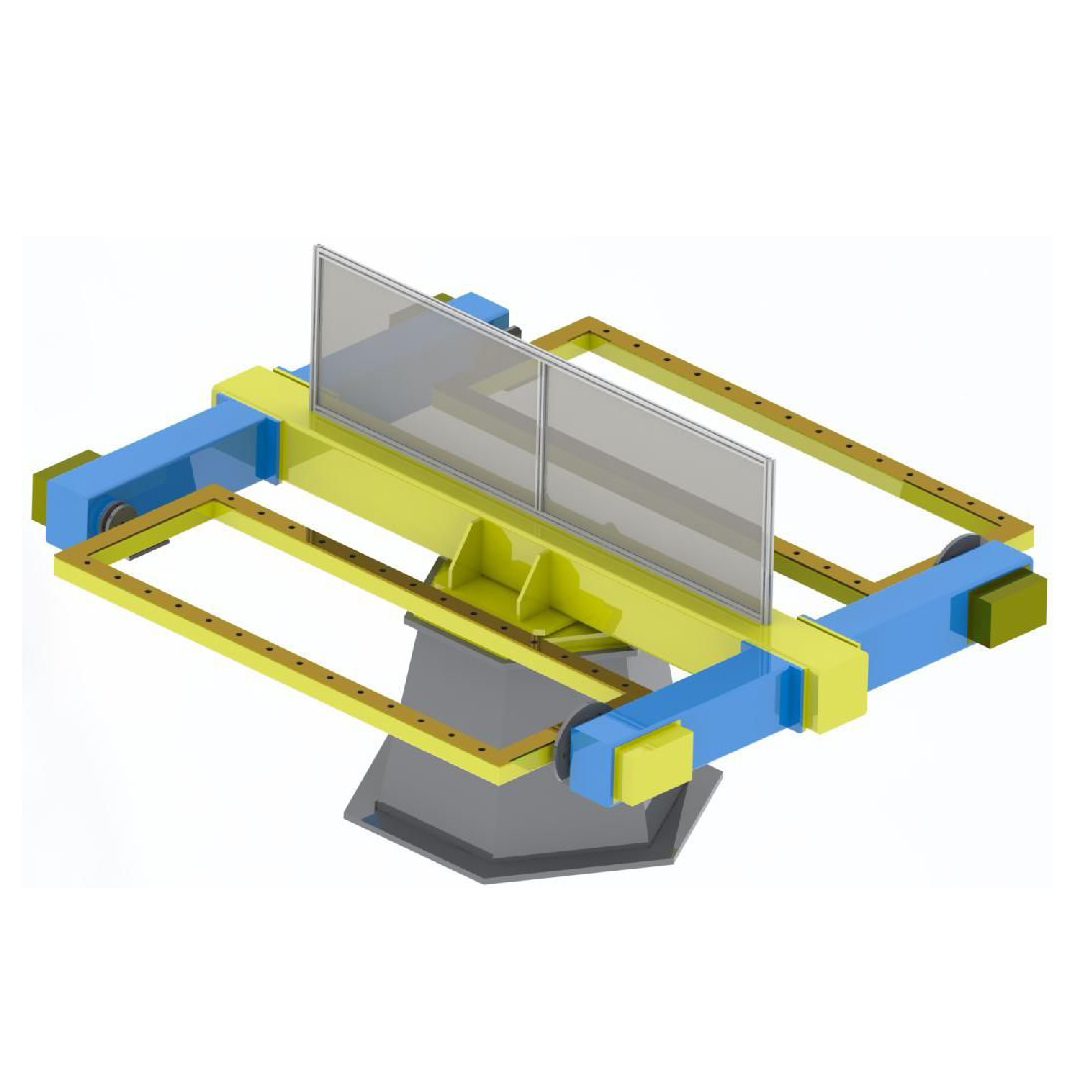
Horizontaler Dreh-Triaxial-Servopositionierer

Vertikaler Dreh-Triaxial-Servopositionierer
Strukturvorstellung
Der dreiachsige vertikale Wendeservo-Positionierer besteht im Wesentlichen aus einem geschweißten Integralrahmen, einem Wendeverstellrahmen, einem AC-Servomotor und einem RV-Präzisionsgetriebe, einer Drehhalterung, einem Leitungsmechanismus, einer Schutzabdeckung und einem elektrischen Steuerungssystem.
Der geschweißte Integralrahmen besteht aus hochwertigen Profilen. Nach dem Glühen und Spannungsarmglühen wird er professionell bearbeitet, um höchste Bearbeitungsgenauigkeit und Präzision an den Schlüsselpositionen zu gewährleisten. Die Oberfläche ist mit einem rostschützenden Lack beschichtet, der ein ansprechendes und hochwertiges Erscheinungsbild bietet. Die Farbe kann kundenspezifisch angepasst werden.
Der Kipprahmen wird aus hochwertigem Profilstahl geschweißt und professionell bearbeitet. Die Oberfläche wird mit Standardgewindebohrungen zur Montage von Positionierungswerkzeugen versehen und anschließend lackiert, geschwärzt und rostgeschützt.
Als Antriebsmechanismus wurde ein AC-Servomotor mit RV-Untersetzungsgetriebe gewählt, der die Stabilität der Rotation und die Genauigkeit der Positionierung gewährleistet.
Lange Lebensdauer und geringe Ausfallrate. Der Leitermechanismus besteht aus Messing und zeichnet sich durch gute Leitfähigkeit aus. Die Leiterbasis ist vollständig isoliert und schützt so Servomotor, Roboter und Schweißstromquelle effektiv.
Das elektrische Steuerungssystem verwendet eine japanische Omron-SPS zur Ansteuerung des Positionierers und zeichnet sich durch stabile Leistung und geringe Ausfallrate aus. Die elektrischen Komponenten stammen von namhaften in- und ausländischen Herstellern und gewährleisten so Qualität und Zuverlässigkeit.
Ein Lichtschutzschild aus Aluminiumprofil und Aluminium-Kunststoffplatte schützt vor Lichtbögen, die beim Schweißen und Schneiden entstehen.








