



Stanz-/Stapelroboter SDCX RMD-300/200/160/120/35/08/110/20/50
Technische Parameter
| Modellnr. | Freiheitsgrad | Fahrmodus | Nutzlast (kg) | Wiederholte Positioniergenauigkeit (mm) | Bewegungsumfang (°) | Höchstgeschwindigkeit (°/s) | Zulässiges Lastträgheitsmoment des Handgelenks (kg·m²)2) | Kreisförmiger Takt (Zyklen/Stunde) | Bewegungsradius (mm) | Lokales Gewicht (kg) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 | 4 | AC-Servoantrieb | 300 | ±0,5 | ±180 | ± +100 bis -44 | ± +121~-15 | ±360 | 85 | 90 | 100 | 190 | 134 | 1000③ | 3150 | 1500 |
| SDCX-RMD200 | 4 | AC-Servoantrieb | 200 | ±0,3 | ±180 | ± +100 bis -44 | ± +121~-15 | ±360 | 105 | 107 | 114 | 242 | 78 | 1300③ | 3150 | 1500 |
| SDCX-RMD160 | 4 | AC-Servoantrieb | 160 | ±0,3 | ±180 | ± +100 bis -44 | ± +121~-15 | ±360 | 123 | 123 | 128 | 300 | 78 | 1500③ | 3150 | 1500 |
| SDCX-RMD120 | 4 | AC-Servoantrieb | 120 | ±0,3 | ±180 | ± +100 bis -44 | ± +121~-15 | ±360 | 128 | 126 | 135 | 300 | 78 | 1560③ | 3150 | 1500 |
| SDCX-RMD50 | 4 | AC-Servoantrieb | 50 | ±0,2 | ±178 | ± +90 bis -40 | ± +65 bis -78 | ±360 | 171 | 171 | 171 | 222 | 4,5 | 1700② | 2040 | 660 |
| SDCX-RMD20 | 4 | AC-Servoantrieb | 20 | ±0,08 | ±1170 | ± +115~-25 | ± +70 bis -90 | ±360 | 170 | 170 | 185 | 330 | 0,51 | 1780① | 1720 | 256 |
| SDCX-RMD08 | 4 | AC-Servoantrieb | 8 | ±0,08 | ±170 | ± +90 bis -40 | ± +68 bis -90 | ±360 | 251 | 195 | 195 | 367,5 | 0,25 | 1800① | 1433 | 180 |
Anmerkungen:
① Die Teststrecke ist 150 mm hoch und 1000 mm breit, und die tatsächliche Zykluszeit wird von den tatsächlichen Arbeitsbedingungen beeinflusst;
② Die Teststrecke ist 200 mm hoch und 1000 mm breit, und die tatsächliche Zykluszeit wird von den tatsächlichen Arbeitsbedingungen beeinflusst;
③ Die Teststrecke ist 400 mm hoch und 2000 mm breit, und die tatsächliche Zykluszeit wird von den tatsächlichen Arbeitsbedingungen beeinflusst;
Vermeiden Sie den Kontakt mit entzündlichen, explosiven und ätzenden Gasen und Flüssigkeiten; Vermeiden Sie Spritzer von Wasser, Öl und Staub; Halten Sie sich von elektrischen Störquellen (Plasma) fern.
Bewegungsumfang
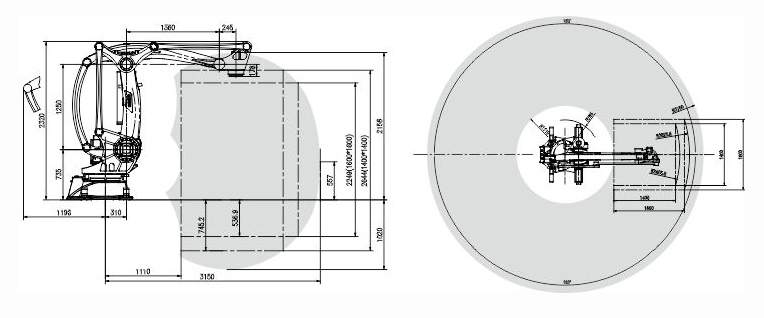
Bewegungsbereichsdiagramm für SDCX-RMD300/200/160/120
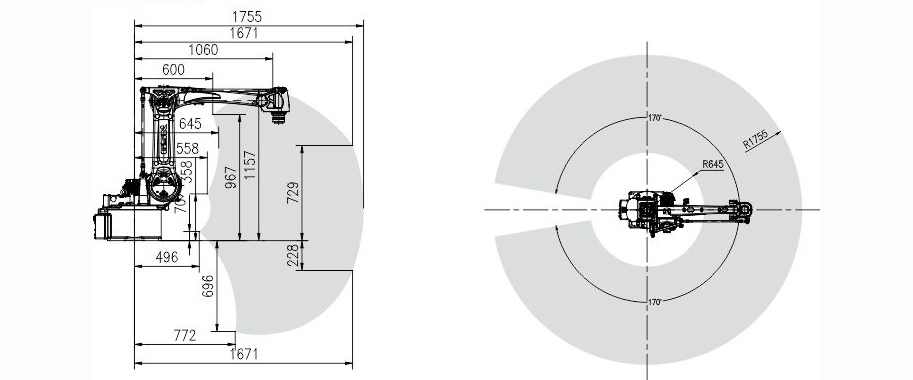
Diagramm des Bewegungsbereichs für SDCX-RMD20
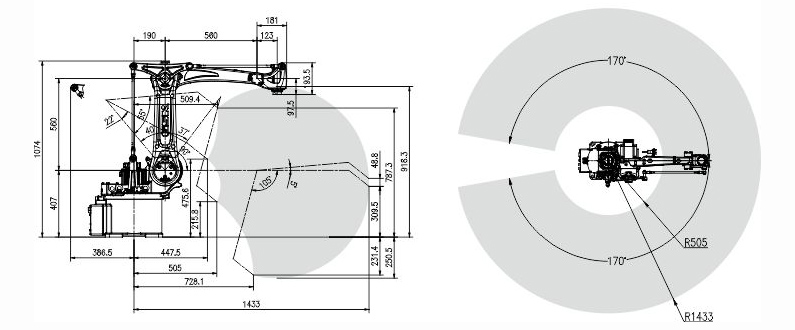
Diagramm des Bewegungsbereichs für SDCX-RMD08
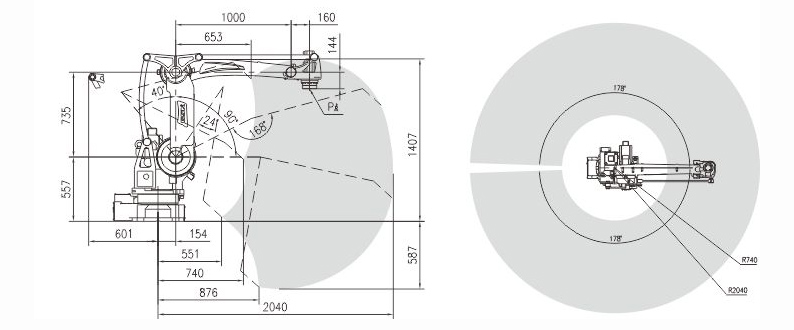
Diagramm des Bewegungsbereichs für SDCX-RMD50
Produktanwendungsanzeige
Lösungen
Technisches Schema des Projekts zur Handhabung von Stahlcoils












