Flexibler kooperativer Roboter der ER-Serie
Technische Parameter
| ER3 | ER7 | ER3 Pro | ER7 Pro | |||||
| Spezifikation | ||||||||
| Laden | 3 kg | 7 kg | 3 kg | 7 kg | ||||
| Arbeitsradius | 760 mm | 850 mm | 760 mm | 850 mm | ||||
| Totgewicht | ca. 21 kg | ca. 27 kg | ca. 22 kg | ca. 29 kg | ||||
| Freiheitsgrad | 6 Drehgelenke | 6 Drehgelenke | 7 Drehgelenke | 7 Drehgelenke | ||||
| MTBF | >35000h | >35000h | >35000h | >35000h | ||||
| Stromversorgung | 48 V Gleichstrom | 48 V Gleichstrom | 48 V Gleichstrom | 48 V Gleichstrom | ||||
| Programmierung | Drag-Teaching und grafische Benutzeroberfläche | Drag-Teaching und grafische Benutzeroberfläche | Drag-Teaching und grafische Benutzeroberfläche | Drag-Teaching und grafische Benutzeroberfläche | ||||
| Leistung | ||||||||
| LEISTUNG | Durchschnitt | Spitzenwert | Durchschnitt | Spitzenwert | Durchschnitt | Spitzenwert | Durchschnitt | Gipfel |
| VERBRAUCH | 200 W | 400 W | 500 W | 900 W | 300 W | 500 W | 600 W | 1000 W |
| Sicherheit | > 22 einstellbare Sicherheitsfunktionen | > 22 einstellbare Sicherheitsfunktionen | > 22 einstellbare Sicherheitsfunktionen | > 22 einstellbare Sicherheitsfunktionen | ||||
| Zertifizierung | Entspricht der Norm „EN ISO 13849-1, Kat. 3, PL d, EU CE-Zertifizierung“. | Entspricht der Norm „EN ISO 13849-1, Kat. 3, PL d, EU CE-Zertifizierung“. | Entspricht der Norm „EN ISO 13849-1, Kat. 3, PL d, EU CE-Zertifizierung“. | Entspricht der Norm „EN ISO 13849-1, Kat. 3, PL d, EU CE-Zertifizierung“. | ||||
| Kraftmessung, Werkzeugflansch | Kraft, XyZ | Kraftmoment, XyZ | Kraft, xyZ | Kraftmoment, XyZ | Kraft, xyZ | Kraftmoment, XyZ | Kraft, xyZ | Drehmoment, xyz |
| Auflösungsverhältnis der Kraftmessung | 0,1N | 0,02 Nm | 0,1N | 0,02 Nm | 0,1N | 0,02 Nm | 0,1N | 0,02 Nm |
| Relative Genauigkeit der Kraftregelung | 0,5N | 0,1 Nm | 0,5N | 0,1 Nm | 0,5N | 0,1 Nm | 0,5N | 0,1 Nm |
| Einstellbarer Bereich der kartesischen Steifigkeit | 0~3000 N/m, 0~300 Nm/rad | 0~3000 N/m, 0~300 Nm/rad | 0~3000 N/m, 0~300 Nm/rad | 0~3000 N/m, 0~300 Nm/rad | ||||
| Betriebstemperaturbereich | 0~40° ℃ | 0~40° ℃ | 0~40° ℃ | 0~40 ℃ | ||||
| Luftfeuchtigkeit | 20-80% relative Luftfeuchtigkeit (nicht kondensierend) | 20-80% relative Luftfeuchtigkeit (nicht kondensierend) | 20-80% relative Luftfeuchtigkeit (nicht kondensierend) | 20-80% relative Luftfeuchtigkeit (nicht kondensierend) | ||||
| 180°/s | ||||||||
| 180°/s | ±0,03 mm | ±0,03 mm | ±0,03 mm | ±0,03 mm | ||||
| 180°/s | Arbeitsumfang | Höchstgeschwindigkeit | Arbeitsumfang | Höchstgeschwindigkeit | Arbeitsumfang | Höchstgeschwindigkeit | Arbeitsumfang | Höchstgeschwindigkeit |
| 180°/s | ±170° | 180°/s | ±170° |
| ±170° | 180°/s | ±170° | 110°/s |
| Achse 2 | ±120° | 180°/s | ±120° |
| ±120° | 180°/s | ±120° | 110°/s |
| Achse 3 | ±120° | 180°/s | ±120° | 180°/s | ±170° | 180°/s | ±170° | 180°/s |
| Achse 4 | ±170° | 180°/s | ±170° | 180°/s | ±120° | 180°/s | ±120° | 180°/s |
| Achse 5 | ±120° | 180°/s | ±120° | 180°/s | ±170° | 180°/s | ±170° | 180°/s |
| Achse 6 | ±360° | 180°/s | ±360° | 180°/s | ±120° | 180°/s | ±120° | 180°/s |
| Achse 7 | ------ | ------ | ------ | ------ | ±360° | 180°/s | ±360° | 180°/s |
| Maximale Geschwindigkeit am Werkzeugende | ≤3 m/s | ≤2,5 m/s | ≤3 m/s | ≤2,5 m/s | ||||
| Merkmale | ||||||||
| Schutzart IP | IP54 | IP54 | IP54 | IP54 | ||||
| ISO-Reinraumklasse | 5 | 6 | 5 | 6 | ||||
| Lärm | ≤70dB(A) | ≤70dB(A) | ≤70dB(A) | ≤70dB(A) | ||||
| Robotermontage | Formal montiert, umgekehrt montiert, seitlich montiert | Formal montiert, umgekehrt montiert, seitlich montiert | Formal montiert, umgekehrt montiert, seitlich montiert | Formal montiert, umgekehrt montiert, seitlich montiert | ||||
| Allzweck-E/A-Anschluss | Digitaler Eingang 4 | Digitaler Eingang 4 | Digitaler Eingang 4 | Digitaler Eingang 4 | ||||
|
| Digitalausgang 4 | Digitalausgang 4 | Digitalausgang 4 | Digitalausgang 4 | ||||
| Sicherheits-E/A-Port | Externer Not-Aus 2 | Externer Not-Aus 2 | Externer Not-Aus 2 | Externer Not-Aus 2 | ||||
|
| Außensicherheitstür 2 | Außensicherheitstür 2 | Außensicherheitstür 2 | Außensicherheitstür 2 | ||||
| Werkzeuganschlussart | M8 | M8 | M8 | M8 | ||||
| Werkzeug-E/A-Stromversorgung | 24 V/1 A | 24 V/1 A | 24 V/1 A | 24 V/1 A | ||||
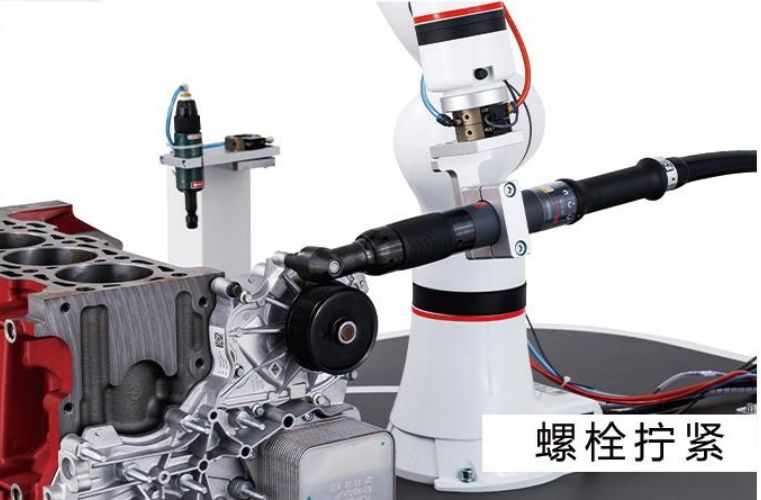
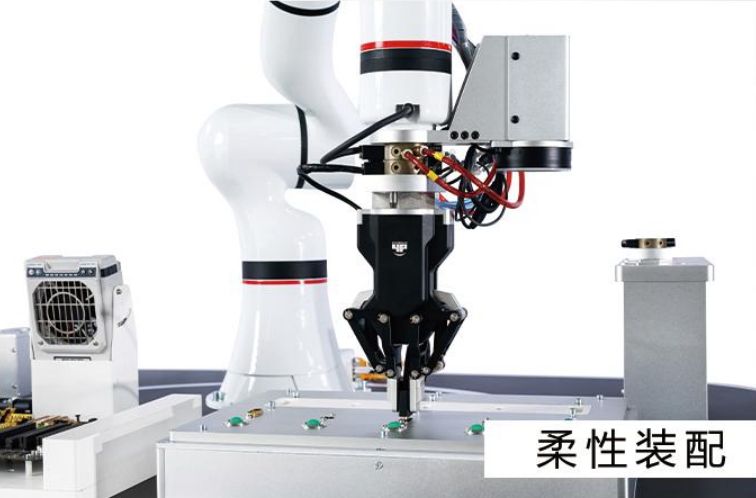
Branchenanwendungen
Die flexiblen kollaborativen Roboter von XMate eignen sich für eine Vielzahl von Prozessanwendungen, darunter flexible Montage, Schraubverbindungen, Inspektion und Messung, Transport, Entfernung von Klebstoffbeschichtungen von Materialien, Gerätepflege usw. Sie können Unternehmen jeder Größe dabei helfen, die Produktivität zu steigern und eine flexible Automatisierung zu erreichen.